

| MOTORS |
|---|
Velmex offers a variety of motor configurations and sizes to power Velmex positioning slides, stages and tables. Motors are sold separately.
tab=0Overviewtab=1Featurestab=2Model / Seriestab=3Specificationstab=4Options / Accessoriestab=5Downloadstab=6Examplestab=7Troubleshooting / FAQs
Motors That Power Velmex Slides and Stages
Velmex Stages including UnSlides®, BiSlides®, XSlides™ and Rotary Tables can be powered by electric motors. Velmex products are built motor-ready. Motors are an adder to the product. Customers may purchase the motors needed direct from Velmex or they can add their own. Most commonly used is a DC step motor although, gear motors, servo motors and high resolution step motors in AC and DC can run Velmex products.
Step motors are preferred for incremental position or scanning when computer controlled motion is desired. They are beneficial for complex motion requirements of more than one distance interval and/or speed, for very fast or slow starts/stops and fast reversing.
Velmex offers a variety of sizes and configurations of Step Motors all at fractional horsepower. Motors should be selected with sufficient minimum torque to reach the top speed required. Review the Step Motor Speed and Torque Charts under the specification section, review the attached pdf chart on Steps, Distance, Speed Calculations or consult with a Velmex Application Engineer to select the appropriate motor for the application.
Motor Features

An electric stepper motor transfers rotational power into linear or rotary movement with the help of a driver/controller. Stepper motors control how far and how fast the movement. They are very accurate. One pulse of electricity to the motor turns it one step, thus the name.
Stepper motors are ideal for short, quick moves which are used in many positioning and motion applications. They can:
• Respond and accelerate quickly.
• They have low rotor inertia that can get to speed quickly.
The standard PK 2-phase stepping motor offers balanced performance enhanced by high torque, low vibration and low noise.
Control step motors with a Velmex VXM™ Motor Controller.
See Limits for more information on the use of limit switches on the Velmex stages with step motors.
Motors
Velmex uses primarily 2-phase stepper motors on its products. Additional motor types including servos are available for custom systems. Please discuss your needs with one of our Application Engineers.
 |
Single Shaft Stepper Motors – Used for most Velmex motorized products – UniSlide, BiSlide and XSlide Assemblies along with Rotary Tables. (sold separately) |
 |
Double Shaft Stepper Motors – Can be used when a dual function stage is desired – i.e., manual and motorized both. Can also be used to drive a rotary encoder and serves as a damper in vertical applications to keep the motor from stalling. (sold separately) |
Standard Steppers are 1.8° motors running half-step mode or 400 steps per revolution. We also offer 0.9° motors, which offer twice the resolution at half the speed.
Servo Motors and others available for custom systems. Please contact an Application Engineer so that your requirements can be met with a system designed to deliver optimal performance for the specific application.
Control step motors with a Velmex VXM™ Motor Controller.
Motor Specifications
The standard stepper motors Velmex uses have an accuracy of ± 3 arc minutes (0.05°).
(This error does not accumulate from step to step.)
Please see the Motor Specification Sheets for details on each motor.
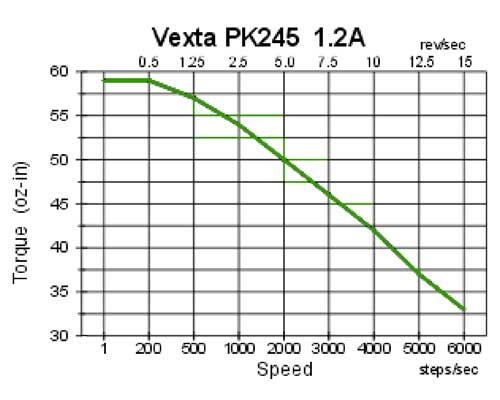
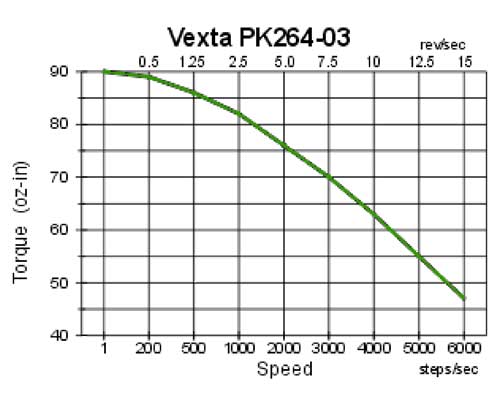
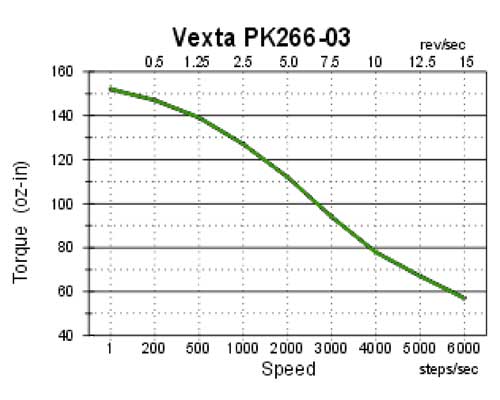
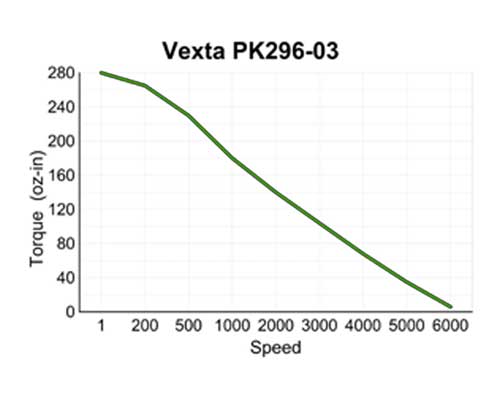
The torque charts display step motor torque versus shaft speed for the different Vexta stepper motor used on Velmex products. All charts are rated using the VXM™ Controller to drive the motor on the positioning equipment.
*Note: motor performance with the VXM control may not be identical to that shown in the data. Payload, length of linear slide, lead screw pitch and other factors influence the ratings.
| Motor | Torque - Speed Chart | |
| Vexta PK245 |  |
 |
| Vexta PK264 |  |
 |
| Vexta PK266 |  |
 |
| Vexta PK268 |  |
 |
| Vexta PK296 |  |
 |
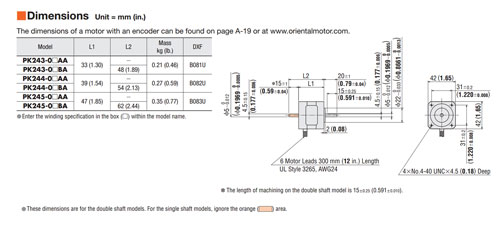
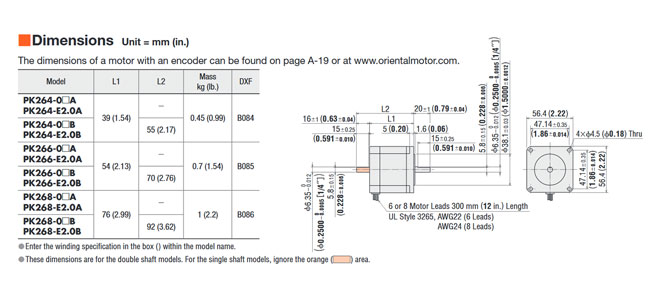
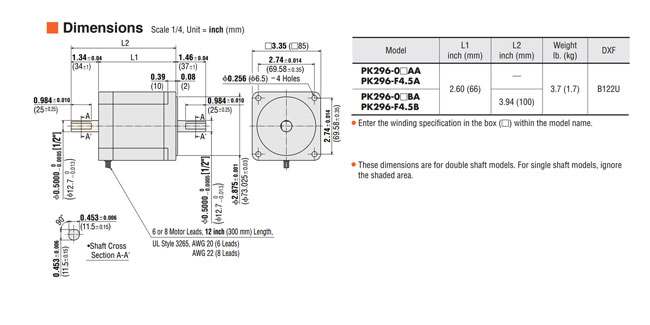
Dimensions of the Vexta Motors
(Click image to enlarge)
 |
|---|
 |
 |
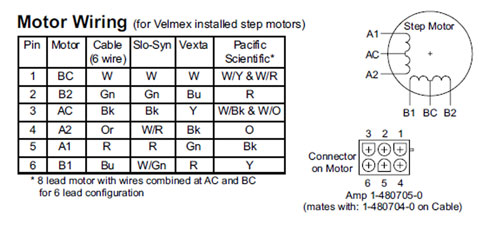
Motor Wiring
Motor Model Number
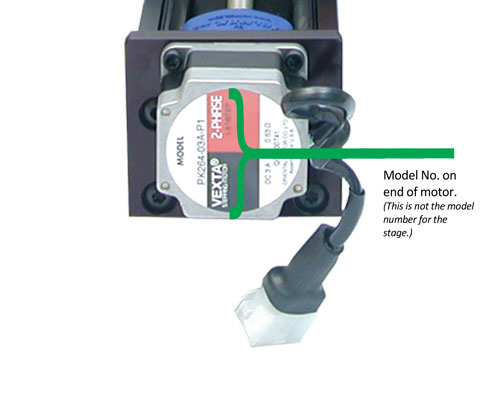
The model number for the stepper motors can be found on the end of the motor.
Options/Accessories for Motors
Additional options / accessories can be purchased that will optimize motor performance or facilitate connecting the Velmex stage to the customer's own motor or motor controller. They include:
 |
Step Motor Damper - Delivers the optimum resonance frequency to the motor deliver a smooth operation. The damper adds an inertial load to reduce resonance in the motor to eliminate vibration and jitter. |
 |
Cables – Motor and Limit Cable Assemblies - Motor cables with connector on motor end for customers with their own controllers. Various lengths are available. |
 |
Cable Adapters - Connectors for older motors. |
 |
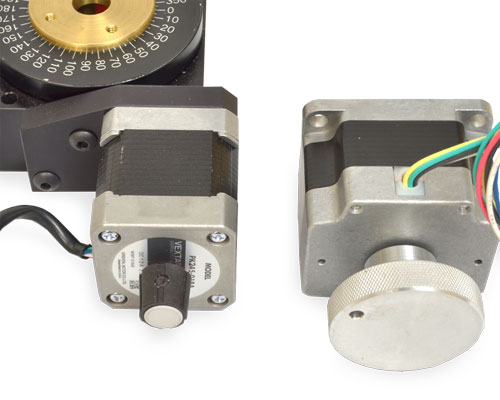
Motorized / Manual Operation– It is possible, using a double shaft motor, to produce a Velmex stage that can be manually operated or motor-driven. A shaft extension accommodates the either a Rogan (pictured left) or standard aluminum knob (pictured below). The motor is purchased separately. Customers can mount their own motors, if they chose |
|
|
Motor Specification Charts
| Type | File Name | Description | Download | View |
|---|---|---|---|---|
| NEMA Type 17 Stepper Motor | ||||
| PK243A1A-SG18,_StepperMotor.pdf | 2-Phase motor with 18:1 gear, single shaft | |||
| PK243B1A-SG18,_StepperMotor.pdf | 2-Phase motor with18:1 gear, double shaft | |||
| PK245-01AA,_StepperMotor.pdf | 2-Phase motor with round shaft - single shaft | |||
| PK245-01BA,_StepperMotor.pdf | 2-Phase motor with round shaft - double shaft | |||
| NEMA Type 23 Stepper Motor | ||||
| PK264-03A,_StepperMotor.pdf | 2-Phase motor with round shaft - single shaft | |||
| PK264-03B,_StepperMotor.pdf | 2-Phase motor with round shaft - double shaft | |||
| PK264M-03A,_StepperMotor.pdf | High Resolution, 2-Phase motor with round shaft - single shaft | |||
| PK264M-03B,_StepperMotor.pdf | High Resolution, 2-Phase motor with round shaft - double shaft | |||
| PK266-03A,_StepperMotor.pdf | 2-Phase motor with round shaft - single shaft | |||
| PK266-03B,_StepperMotor.pdf | 2-Phase motor with round shaft - double shaft | |||
| PK266M-03A,_StepperMotor.pdf | High Resolution, 2-Phase motor with round shaft - single shaft | |||
| PK266M-03B,_StepperMotor.pdf | High Resolution, 2-Phase motor with round shaft - double shaft | |||
| PK268-03A,_StepperMotor.pdf | 2-Phase motor with round shaft - single shaft | |||
| PK268-03B,_StepperMotor.pdf | 2-Phase motor with round shaft - double shaft | |||
| NEMA Type 34 Stepper Motor | ||||
| PK296-03AA,_StepperMotor.pdf | 2-Phase motor with round shaft - single shaft | |||
| PK296-03BA,_StepperMotor.pdf | 2-Phase motor with round shaft - double shaft | |||
| PK296B2A-SG3.6,_StepperMotor.pdf | 2-Phase motor with 3.6:1 gear, double shaft | |||
| PK296B2A-SG7.2,_StepperMotor.pdf | 2-Phase motor with 7.2:1 gear, double shaft | |||
| PK296B2A-SG10,_StepperMotor.pdf | 2-Phase motor with 10:1 gear, double shaft | |||
| PK296B2A-SG18,_StepperMotor.pdf | 2-Phase motor with 18:1 gear, double shaft | |||
| PK296B2A-SG36,_StepperMotor.pdf | 2-Phase motor with 36:1 gear, double shaft | |||
Other Technical Documentation
| Type | File Name | Description | Download | View |
|---|---|---|---|---|
| Motor Wiring.pdf | Diagram - Wiring for step motors installed on Velmex devices | |||
| VXM - Stepper Motor Speed Charts.pdf | Information on speed and linear distance at revolutions per minute and per second - measured using a Velmex VXM Motor Controller | |||
| Increments with VXM and Steppers.pdf | Tech Chart:- Increments that can be moved using various Velmex linear stages, the VXM Controller and step motors | |||
| Calculation Steps Direction Speed with VXM.pdf | Tech Chart -: Various calculations for determining speed, steps and direction using step motors and the VXM Controller |
Velmex Motorized Examples
These are examples of Velmex products. If you wish a similar product, please contact us with your specific application specifications (travel distance, payload, hours per day in use, resolution, speed range, etc.). You can use the Request Assistance form. |
Product and accessory offering is subject to change and availability.
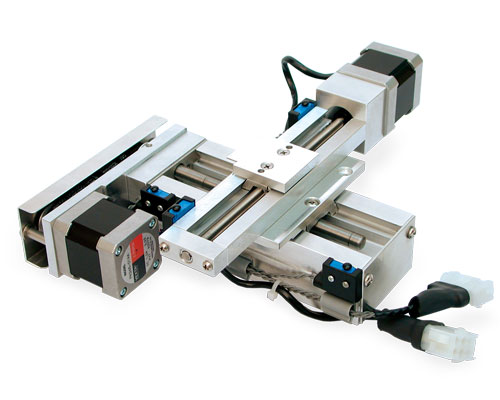
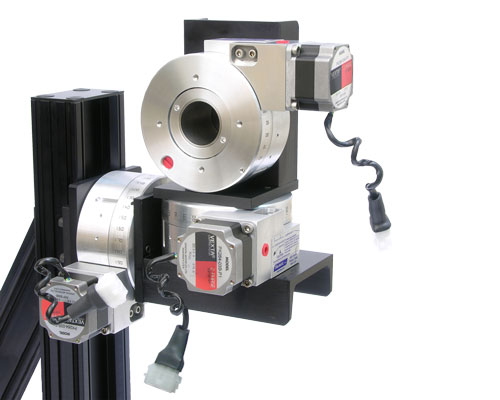
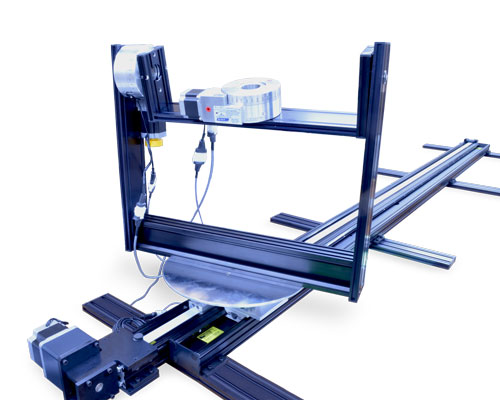
The following images are examples of Velmex products with stepper and servo motors. For information about the Velmex product, please refer to the specific brand/model page.
| Example Key Code | Meaning | Example Key Code | Meaning |
|---|---|---|---|
| A | Manually Operated | M | Motorized |
| S | Standard | C | Custom Configuration |
| B | BiSlide | U | UniSlide |
| X | XSlide | R | Rotary Tables |
| T | XY / Elevating Tables | TT | Turntables |
| E | Elevating Tables | FS | Fun Stuff (Ingenious, Cool, or Just out of the ordinary applications) |
Stepper Motors
|
|




Servo Motors
|
|


Stepper Motors
|
|


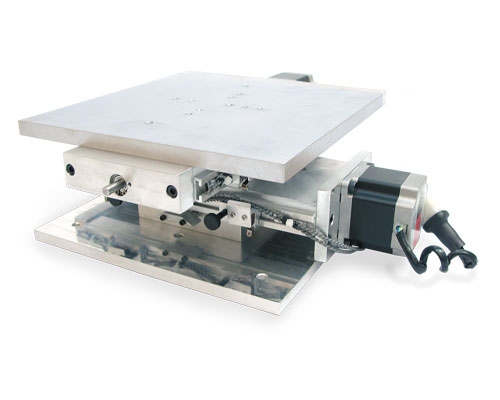
Stepper Motors


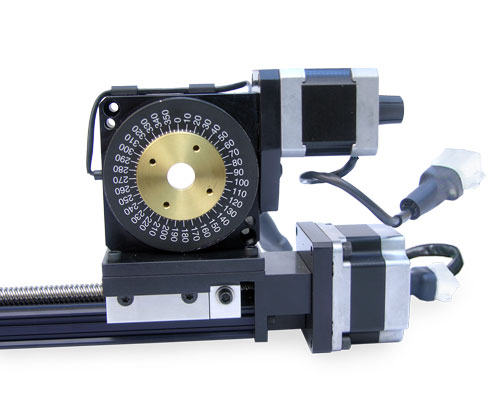
Stepper Motors
|
|


Examples of other Velmex products can be found on the Examples page or in the Examples section for each product.
Many questions can be answered by reviewing the "Features", "Model / Series", "Specifications", "Options / Accessories" and "Technical Documentation" sections for each product line. Additional FAQs about product comparisons, product construction, purchasing and shipping can be found on the company FAQ page.
Motor FAQs
When should I use a step motor?
• For incremental positioning or scanning when computer-controlled motion is desired.
• For complex motion requirements of more than one distance and/or speed; fast or slow starts/stops, and fast reversing.
• When accurate speeds are required.
• For speed range requirements as high as 1 to 8000 steps/sec.
• When a brushless motor is required.
Why use step motors with Velmex stages as opposed to other types of motors?
Step motors are very common in linear positioning because of their ability to operate within very precisely defined increments. They work efficiently when there is frictional load to dampen them. Velmex assemblies have friction, and a polymer lead screw drive nut which absorbs step vibration. Velmex lead screws have low inertia relative to the motor inertia, making very fast accelerations and decelerations possible. Step motors reach full torque in just one step.
Will the motor miss/lose steps occasionally?
Step motors, when controlled with Velmex Controllers, do not miss or lose steps. Step motors run synchronously to their phase switching speed. When an external motor load exceeds the running torque of the motor, the motor may stall and lose a position greater than one step.
Velmex step motor controllers remove the problems of low speed motor resonance by utilizing half-stepping and controlling the current. The VXM™ Controller switches the motor drive amplifiers directly, eliminating the sensitive pulse to motor translator link.
How do I insure the motor will not stall?
Proper motor sizing and operating the motor in a range that provides a torque reserve will ensure reliable operation. Review the motor speed/torque curves to determine the maximum reliable operating speed. Our Sales Application Engineers can help you determine the right motor size to operate the Velmex slide efficiently and effectively.
Will a stalled motor damage the motor?
No. When the motor stalls (loses synchronicity) the motor output torque drops very low, and the motor current drops slightly. No mechanical components slip, only the magnetic field. A step motor is a good solution for torque limiting applications.
Does the stepper motor and/or VXM Controller give any indication it is not running properly?
Depending on the situation, the system may sound different than it does under normal operation. The following are some sound bytes to help troubleshoot motor and controller operation.
| Description | Sound |
|---|---|
| The sound of a normal operating stepper motor: | |
| The sound of an overloaded motor: | |
| The sound of a motor when acceleration is set too high: | |
| The sound of a motor when the speed is set too high: | |
| The sound of a motor with a broken wire: |