
Knowledge Base
Guide to Motion / Positioning Systems
Linear Stage / X Axis Stage
One axis stage (also called a slide or translation stage) travels in a straight line along one plane or axis. The stage can be horizontal. It can be vertical which would be on a Z axis. It is also possible with some stages to invert them horizontally so that the payload is "below" the stage. A payload is mounted or placed on the carriage of the stage.
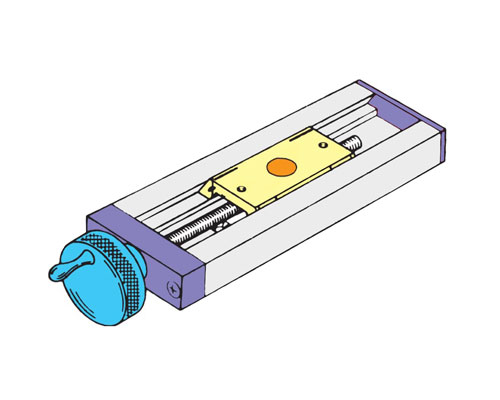 The stage usually consists of:
The stage usually consists of:
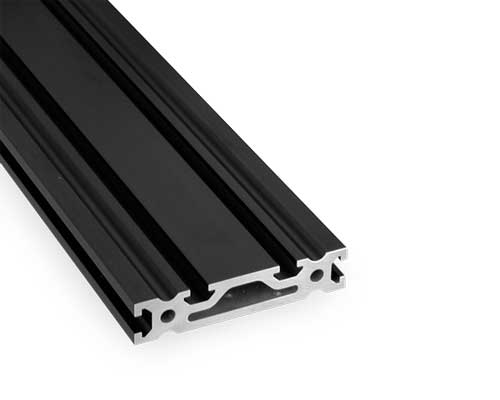
• A base (ways) on which the carriage rides. The base on a Velmex stage is a dovetail extrusion.
• A carriage which carries the payload.
• A means to control the position of the carriage. This can be a crank and knob, a graduated knob, a micrometer head or a motor. On a Velmex Free Slide, position is controlled by the operator pushing the carriage into position.
Stages can also be operatoperated with motors. Most of Velmex's offering can accommodate stepper motors, but also Servo Motors and DC Motors.
• Additional options can be added with include: locks, counters, limit switches, encoders, etc.
XY Stage
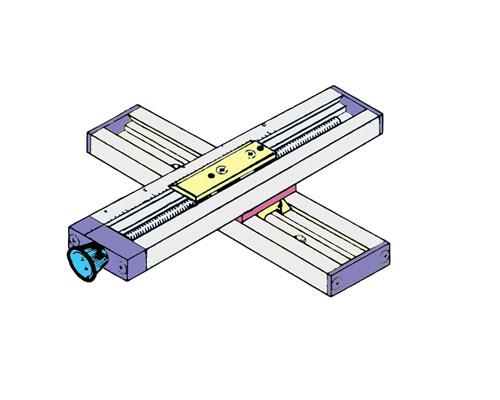 An XY stage is 2 linear slides mounted together. One stage/slide is on the X axis and the other is on the Y axis. Usually these are horizontal but can be in an inverted horizontal configuration. The top (or Y) slide's base is mounted to the bottom (or X) slide's carriage. The payload is then placed on the Y's carriage.
An XY stage is 2 linear slides mounted together. One stage/slide is on the X axis and the other is on the Y axis. Usually these are horizontal but can be in an inverted horizontal configuration. The top (or Y) slide's base is mounted to the bottom (or X) slide's carriage. The payload is then placed on the Y's carriage.
Load maximum for the bottom or X slide must now be calculated including the weight of the Y slide and any components used to attach it to the X slide. The stage can be manually- or motor-driven.
XY Table
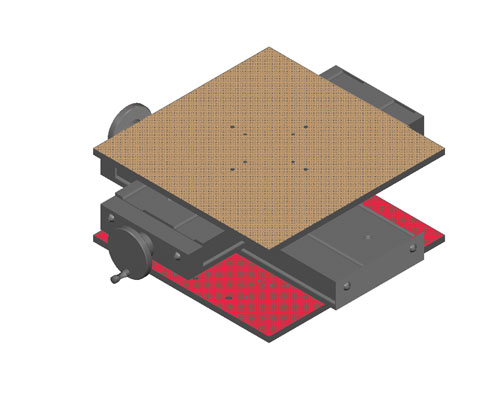 An XY stage is often considered an XY table. However, there are specific configurations XY Table that usually are comprised of a larger base and carriage platform, hence the name, XY Table. An XY Table still travels horizontally in X and Y. The larger carriage plate supports a payload with a larger physical geometry. Both the base plate and the platform plate are affixed to their corresponding slide in the center of the plate. The the maximum load capacity is now calculated including the weight of the Y slide and the carriage platform. XY stages and tables have a limited range of motion.
An XY stage is often considered an XY table. However, there are specific configurations XY Table that usually are comprised of a larger base and carriage platform, hence the name, XY Table. An XY Table still travels horizontally in X and Y. The larger carriage plate supports a payload with a larger physical geometry. Both the base plate and the platform plate are affixed to their corresponding slide in the center of the plate. The the maximum load capacity is now calculated including the weight of the Y slide and the carriage platform. XY stages and tables have a limited range of motion.
An XY Table can also be comprised of 2 linear slides traveling in tandem on the X axis and 2 traveling in tandem on the Y axis. In this configuration the tandem slides affixed at the outside perimeter of the base plate and platform plate. Frequently this type of XY table will have an aperture in the center because the slides are attached at the perimeters of the base and platform plate.
Elevating Table
 There are a number of different configurations of elevating tables in the motion industry. One is usually called a lift table and frequently uses a scissors mechanism to move the top platform up and down.
There are a number of different configurations of elevating tables in the motion industry. One is usually called a lift table and frequently uses a scissors mechanism to move the top platform up and down.
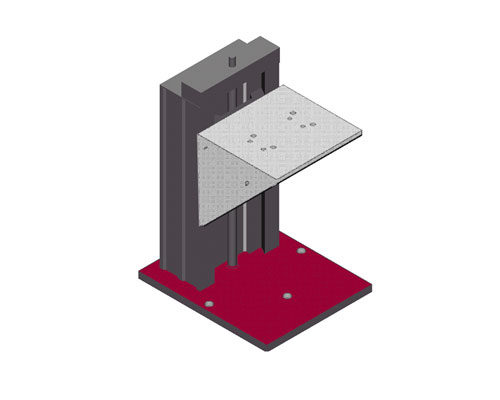
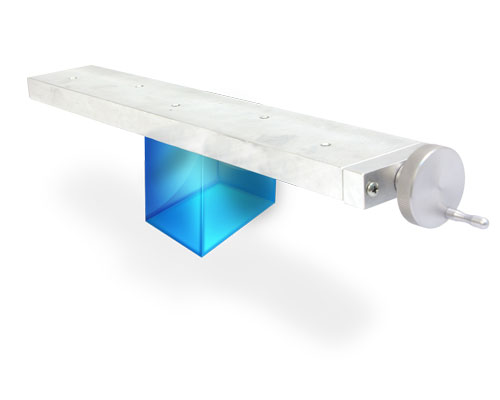
Another form of elevating table uses a linear slide mounted on the Z axis to a base plate. The payload can be mounted directly to the carriage or it can be mounted on a L-shaped platform bracket which is in turn mounted to the carriage.
Small Elevating tables can be driven manually or motorized. Larger tables can also be pneumatic or hydraulic.
XZ Stage
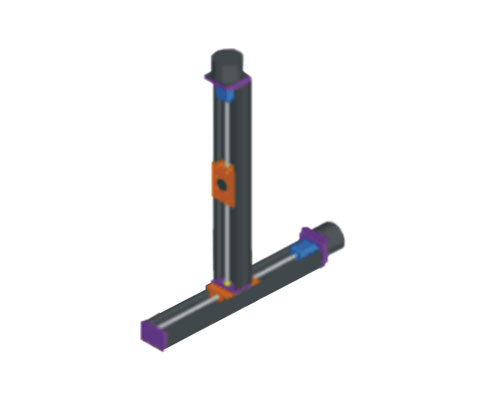 An XZ stage is similar to an XY stage with 2 linear slides mounted together. However, in this configuration the base slide is on the X axis and the other is on the Z axis. The end plate of the Z slide is mounted to the carriage on the X slide at a right angle. The payload is then placed on the Y's carriage or on a L-shaped platform bracket which is in turn mounted to the carriage.
An XZ stage is similar to an XY stage with 2 linear slides mounted together. However, in this configuration the base slide is on the X axis and the other is on the Z axis. The end plate of the Z slide is mounted to the carriage on the X slide at a right angle. The payload is then placed on the Y's carriage or on a L-shaped platform bracket which is in turn mounted to the carriage.
Load maximum for the bottom or X slide must now be calculated including the weight of the Z slide and any components used to attach it to the X slide. This is more than likely also going to be a cantilevered load. The stage can be manually- or motor-driven.
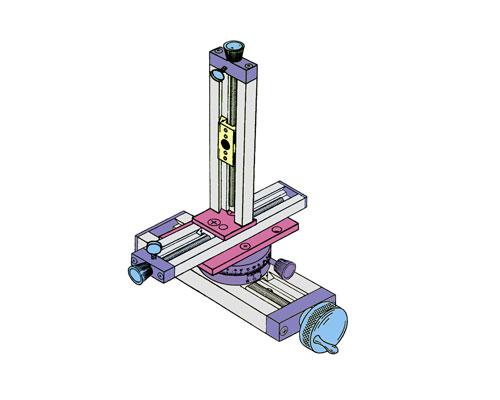
XYZ System
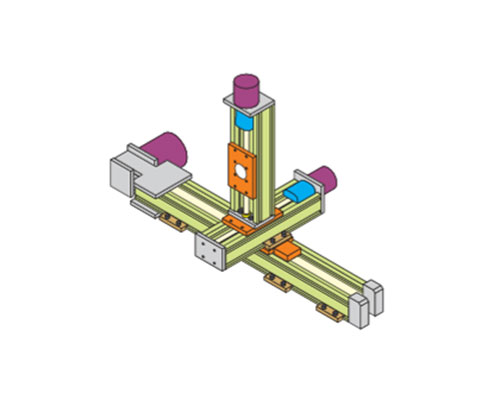 In an XYZ system there are 3 axes. One linear slide moving on the X axis; one slide moving on the Y axis and one slide moving on the Z axis. The linear slide in Z is mounted at a right angle on to the carriage on the Y axis.
In an XYZ system there are 3 axes. One linear slide moving on the X axis; one slide moving on the Y axis and one slide moving on the Z axis. The linear slide in Z is mounted at a right angle on to the carriage on the Y axis.
Load maximum for the base or X slide must now be calculated including the weight of the X slide and the weight of the Z slide and any components used to attach them to the other slides. The system can be manually- or motor-driven.
Gantry System
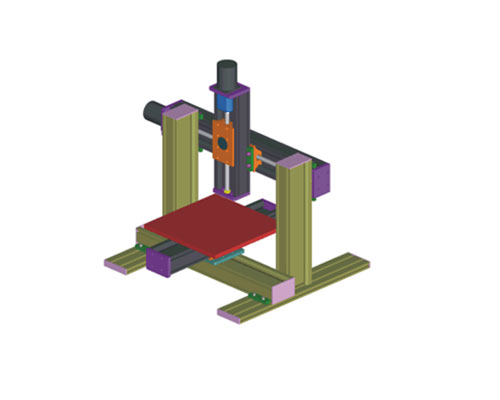 Gantries are composed of linear slides. Their linear movements are in three axes, X, Y, and Z. The slide with the payload is suspended above the work space either on other linear slides or a framework. Frequently the X axis has 2 linear slides moving in tandem.
Gantries are composed of linear slides. Their linear movements are in three axes, X, Y, and Z. The slide with the payload is suspended above the work space either on other linear slides or a framework. Frequently the X axis has 2 linear slides moving in tandem.
Because the payload is suspended the Gantry system has the best accessibility to the surrounding work space. Frequently a Gantry system is motorized.
Rotary Table
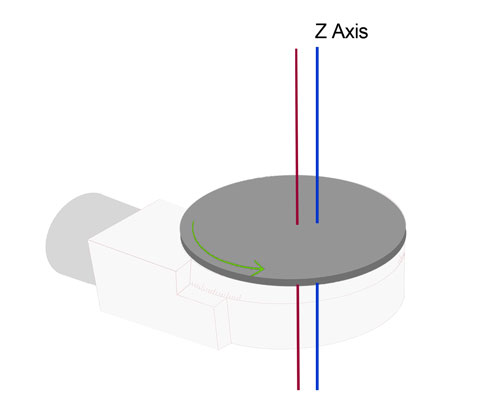
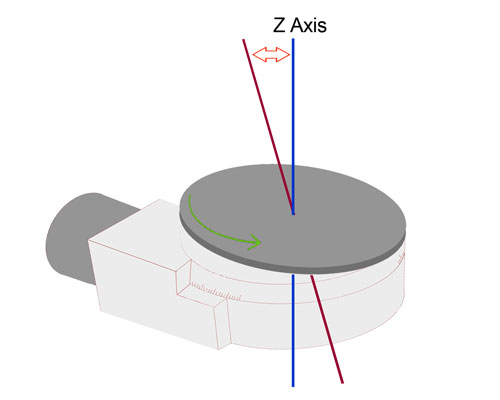
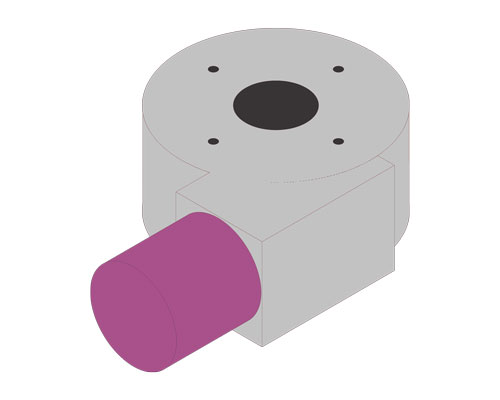 Rotary tables are positioning devices that rotate the payload 360° around a center axis. When operating or mounted horizontally, the table is rotating around a vertical axis. When mounted vertically or on its side/end, the table is rotating around a horizontal axis. The revolving axis is a theta axis.
Rotary tables are positioning devices that rotate the payload 360° around a center axis. When operating or mounted horizontally, the table is rotating around a vertical axis. When mounted vertically or on its side/end, the table is rotating around a horizontal axis. The revolving axis is a theta axis.
Rotary tables can be manually- or motor-driven. Large scale rotary tables are frequently found in CNC machining operations. They are also used in indexing or pan and tilt operations.
Combination System
 A combination system is a multi-axis system that combines linear and rotary stages. They can be relatively simple with two or three axis or extremely complex with multiple axes in X, Y, Z and theta and any combination thereof, creating compound movements.
A combination system is a multi-axis system that combines linear and rotary stages. They can be relatively simple with two or three axis or extremely complex with multiple axes in X, Y, Z and theta and any combination thereof, creating compound movements.
A motorized, multi-axis system could also have synchronized movements through the use of a motor controller.
| Abbe Error | An off-axis error. |
|---|---|
| Acceleration | The rate velocity changes for an object; measured over a unit of time. |
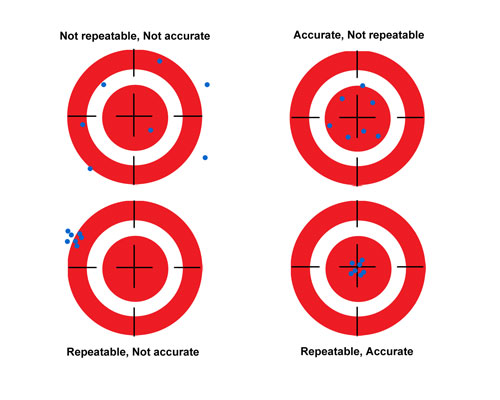
| Accuracy | The degree to which a position measurement conforms to the prescribed or standard. A measurement indicating the difference between the actual value and the expected value of a position. See Repeatability. |
| Actuator | A device that moves or controls a mechanism or system using electromechanical means to produce rotary or linear motion. Often in the motion industry "actuator", "slide" and "stage" are used interchangeably. |
| Advance | How far along the lead screw does the position on the carriage advance per one full revolution of the lead screw. Lead screw advance depends on diameter and thread count of the lead screw. |
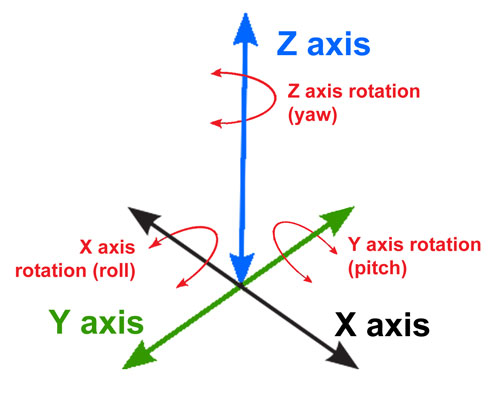
| Axes of Motion | The direction (plane) along which movement occurs. In the case of positioning systems, number of directions or positioners incorporated. They can be defined as: X: Linear motion in positioning direction (Horizontal) Y: Linear motion perpendicular to positioning direction Z: Vertical linear motion Theta -- Θ -- Frequently referring to movement on a rotating plane or circular direction. Rotational direction also is referred to as: A or Roll: Rotary motion around the X axis B or Pitch: Rotary motion around the Y axis C or Yaw: Rotary motion around the Z axis |
 |
|
| Axis | (pl. - Axes) The direction or plane along which movement occurs. See Axes of Motion. |
| Axis of rotation | Imaginary straight line through fixed points around which a device rotates. See Axes of Motion. |
| Back Driving | When the force of the load overcomes the current stationary position motion device and drives the lead screw in reverse. Back driving can result from a steep or high helix angle on the lead screw. It is noticeable particularly when supporting a vertical load. To reduce the back drive, design with a lower helix angle lead screw or use a braking or locking mechanism. |
| Backlash | "The "play" or "slop" in the movement of a mechanical system. Can also be referred to as recoil. Backlash can be minimized with the proper system and controller. |
| Ball Screw | Screw drive where the threads on the screw are designed as a ball bearing race. (Velmex does not offer ball screw stages.) |
| BiPolar Stepper Motor | Stepper motor that operates with two polarities – positive and negative – voltage. See Unipolar Stepper Motor. |
| Bus Cable | Cable that connects two or motor electronic components (usually similar devices) together to create one system. |
 |
|
| C.O.S.M.O.S.™ | Computer Optimized Stepper Motor Operating System – Velmex proprietary software that coordinates communication between a VXM™ Motor Controller, the stepper motor, limit switches and the computer. |
 |
|
| Cantilevered load | Payload that is not symmetrically centered on a stage or slide. |
 |
|
| Closed Loop | A system where the feedback from the sensors/monitors automatically triggers the reaction or next step. In motion, when the sensor (encoder) reads that the system is out of position, the system automatically corrects itself moving to the proper position. |
| Coefficient of friction | A ratio derived from the force required to move two sliding surfaces over each other, divided by the force or load holding them together. |
| Controller | Devices that regulate, direct and restrain the operation of the motors in motorized positioning systems. |
| Coordinated motion | A multi-axis system where the movement and position of each axis is dependent on the other. The movements are often controlled by a motor controller like the VXM™. The motion in the Velmex system in the Geo Man video is an example of coordinated motion. |
| Critical Speed | The maximum rotational velocity at which a lead screw can turn before it develops a resonance and starts to vibrate. |
| Damping, Damper | Reduction of energy or decay of a signal to its steady state. A device that attaches to a motor shaft (lead screw) to absorb energy, i.e. shock absorber. |
| Detent Torque | The amount of torque produced when the motor is not energized. |
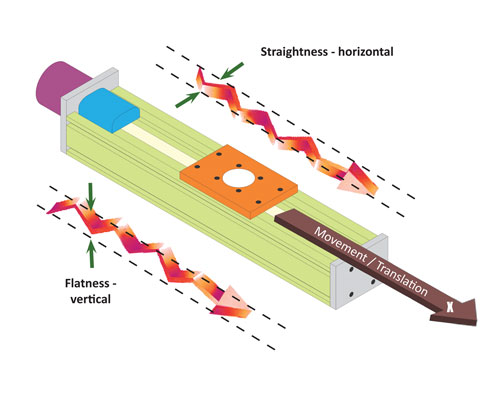
| Deviations from Straightness | Three types of deviations from straightness can be measured in a linear slide: • Run Out, which is the deviation from a straight line in the horizontal plane. • Bow, which is the vertical plane deviation from a straight line in the upward direction. • Twist, which resembles a corkscrew effect, is twisting in the direction of the slide. (See Flatness of Travel and Straight Line Accuracy) |
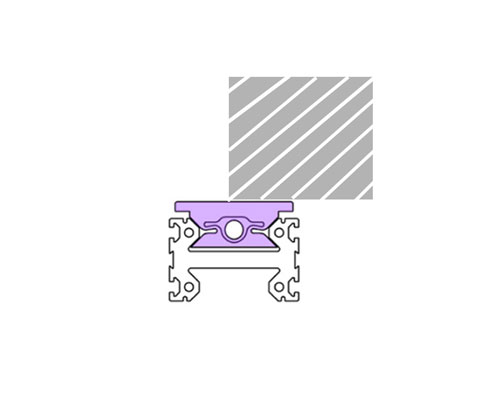
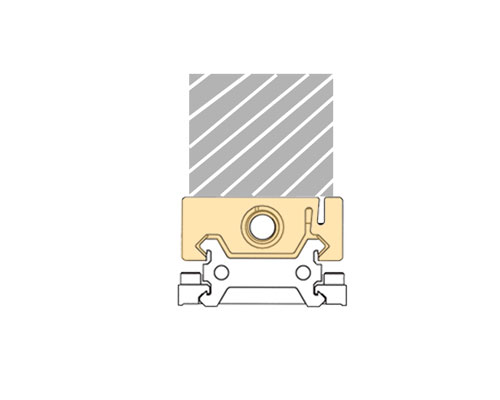
| Dovetail | A joint formed by one or more tapered projections on one piece that interlock with corresponding notches or recesses in another piece. In positioning stages it's how the slider/carriage interlocks with the ways/rails. Dovetails increase the strength and load capacity. |
 |
|
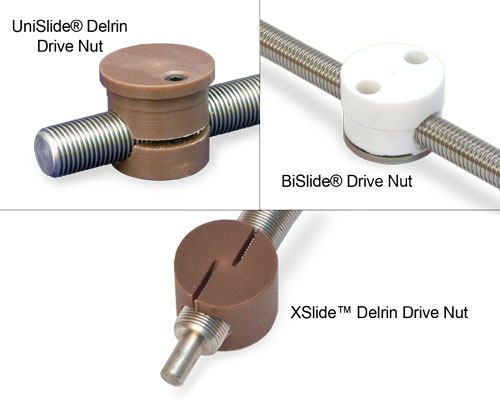
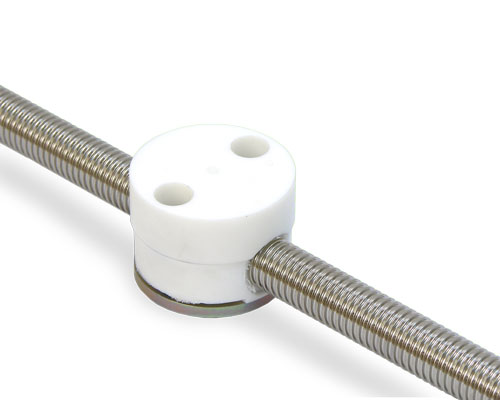
| Drive Nut | The connection between the carriage on a linear slide and the lead screw that moves the carriage along as the lead screw turns. |
 |
|
| Duty Cycle | One of the factors that can effect the efficiency of the stage. The ratio of operating time to total cycle time. (On versus off+on) |
| Dwell Time | Period during which no movement occurs. |
| Dynamic Load | The load while the stage is moving. Payload, vibrations, steps, direction etc. effect and vary the load. |
| Eccentricity | Eccentricity occurs when the axis of rotation of a stage is off its mechanical / absolute center. |
 |
|
| Encoder | A sensor or feedback device that converts motion into signals to indicate payload position. |
 |
|
| — Encoder – Absolute | A sensor that provides an absolute value for each angular position even over several rotations. It always knows where it is, even it loses power. |
| — Encoder – Incremental | A sensor that reads the changes in position of the carriage. |
| — Encoder – Inductive Scale | A sensor that reads how an electromagnetic field interacts with surrounding metallic materials as the position is changed. |
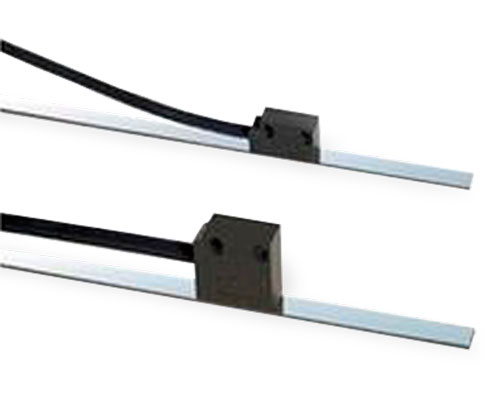
| — Encoder – Magnetic Scale | Sensors that read a magnetic strip on the slide to determine position of the carriage. |
| — Encoder – Rotary | A sensor that measures (counts) the turns of the motor shaft or lead screw to determine position. |
| — Encoder – Optical | An encoder that uses a light source and a detector to measure interruptions of the light. Optical encoders are classified as absolute or incremental. |
| Flatness of Travel | A measurement of the vertical deviation from level in the horizontal plane. As measured while the stage is moving. |
 |
Environment | One of the factors that can effect the efficiency of the stage. Can refer to temperature, contaminants present, cleanroom or vacuum environment, etc. For Velmex Stages see Vacuum Applications. |
| Free Slide | A simple positioning device consisting of the slider/carriage and the ways. There is no means of driving the payload other than manually pushing or pulling the carriage. |
| Full step | A stepper motor's movement increments as measured in degrees. A 1.8° step motor takes 200 steps for the motor to make 1 complete revolution. |
| Gantry | A frame that either is over the stage to hold the payload or creates a suspension support for the stage itself. A gantry can travel linearly on the X, Y or Z axes or multiples of those axes. |
| Gearbox | A gear box is a housing utilizing gears that reduces the speed of a motor and multiplies usable torque. It also can be used to transfer the turning of a manual knob/crank to the rotating of a lead screw. Referred to as a right-angled gearbox. Most commonly used when the knob/crank cannot be in line with the lead screw and is placed perpendicular. |
| Half step | Half step is 1/2 a full step. In the case of an 1.8° step motor it takes 400 steps for the motor to go full circle. As it turns it is alternating single and dual phases to produce the half steps. |
| Home Switch | A sensor that marks the starting position (home) for the duty cycle; usually used on rotating tables. |
| Incremental Move (Relative move) | Incremental is one move relative from the current starting position. Could be one step, one half step, or one microstep. |
| Indexing | The process of an axis or axes moving to a position, whether incremental or absolute. |
| Lead Screw | A device which translates rotary or turning motion into linear motion. (Power screw or Translation screw) A leadscrew moves the slide/carriage along the traverse at a constant rate. Constructed of an externally threaded screw and an internally threaded carriage (nut). |
 |
|
| Left-Right Hand Screw | The threads on a lead screw can twist in two different directions – left hand or right hand. It is possible to combine both on one lead screw with a direction change at the centerline of the lead screw. This allows for synchronous travel where the carriages are either moving away or toward each other. |
| Limit switch | Limits are electro-mechanical devices that help to regulate motion - start, stop, slow down, or accelerate operations and sometimes trigger forward or reverse. They are sensors that determine end of travel on positioning devices. |
 |
|
| Limits | Where limit switches (sensors) are placed to determine where motion should stop in each direction of travel. |
| Linear Motion | Movement between two endpoints where the path of movement is a straight line. Spatially it uses only one axis, one plane or one dimension. |
| Load | An external force, frequently the weight of the payload that is exerted on a slide or stage carriage. The load can also be exerted onto the motor. |
| Load Capacity | The maximum recommended payload for a stage or slide to operate efficiently. |
| Micrometer | A device using screw principles for precise manual movements, usually in smaller increments than a single thread will allow. |
 |
|
| Microstep | An electronic control technique that divides the step angle of a stepper motor into smaller steps. |
| Misstep | When the stepper motor loses synchronization. Can be caused by rapid speed changes or an overload. |
| Momentary Load | The maximum force/load that a stage or slide can handle while not in motion. |
| Noise | Interference from an electrical signal, often from radio frequency interference or from electromagnetic interference. |
| Non-Synchronous Motion | Simultaneous motion on multiple axes with no coordination or interaction between axes. The motion in the Velmex assembly line system video is an example of non-synchronous motion. |
| Normal Centered | Payload that is symmetrically centered on a stage or slide. |
 |
|
| Orientation | Usually refers to the orientation of the stage. It could be horizontal, vertical, inverted (upside-down) or set on its edge. Can also be the orientation of the payload. See Normal Centered, Cantilever. |
 |
|
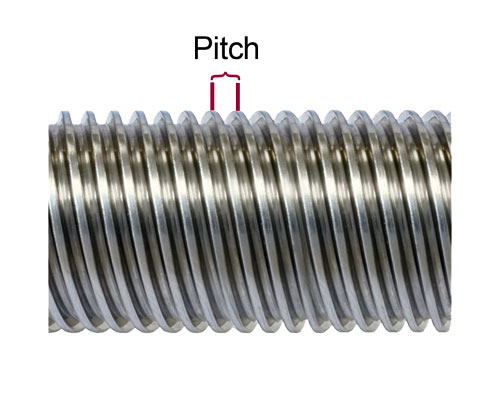
| Pitch (on Lead Screw) | Pitch is the distance from the crest of one thread to the next on a lead screw. Coarse threads are those with larger pitch (fewer threads per axial distance), and fine threads are those with smaller pitch (more threads per axial distance). Coarse threads deliver faster manual speeds than fine pitch threads. For Velmex linear slides its how many full turns of the lead screw does it take to advance the carriage 1" or 1 mm. |
 |
|
| Pitch (Direction) | The motion that rotates around the Y horizontal axis. See Axes of Motion. |
| Potentiometer | A simple knob that delivers variable resistance to control a circuit. A potentiometer is used on the Velmex VXM™ Controller – VXM-1J – to control speed. (Also referred to as a "pot".) |
| Rapid Advance | A clutch mechanism that allows for quickly moving the slider/carriage from one position to another. It works by uncoupling the drive screw, manually pushing the slide and re-engaging the drive screw. See the Velmex Rapid Advance video to see how it works. |
| Repeatability | The ability to return to the same position with minimal deviation. Enlarge Chart |
 |
|
| Resistance | Force that opposes the effects of other external forces. |
| Resolution | The smallest increment the system can move or measure. |
| Resonance | A periodic force that creates increases in amplitude at a particular frequency. Certain frequencies can excite the system causing a stall (loss of synchronization). |
| Roll | The motion that rotates around the X horizontal axis. See Axes of Motion. |
| Run Out (Horizontal Run Out) | A deviation in the horizontal straightness of a linear stage. |
| Screw Lead Accuracy | How accurate the lead screw is in achieving the position. A measurement of the deviation of a leadscrew from its nominal pitch. |
| Servomotor | A motor optimized to run with a feedback loop. Typically used for "Closed-Loop" applications. |
| Settling Time | The time it tales for the response from a step to stop all movement and reach the position commanded. |
| Slide | Positioning device, typically linear with straight line movement. |
| Slider | The carriage that supports the payload on a slide or stage. This is the element that moves along the drive shaft or ways. |
 |
|
| Speed | The velocity of a motion system or motor. |
| StabilNut™ | A Velmex exclusive designed drive nut on Velmex BiSlide Assemblies. This connection between the carriage and the lead screw has an anti-backlash design with a fine mesh adjustment. |
 |
|
| Stage | Positioning device. Sometimes used interchangeably with "Slide". Stages are a broader category and include XY and Rotary Tables. |
| Static Load | The force or load being applied to the slide or stage when not in motion. (The carriage has a payload.) |
| Stepper Motor | A synchronous motor optimized to run on square waves in a specific sequence. It translates the waves or pulses into discrete movements. Also referred to as a Stepper. |
| Step and Direction | A simplified control that issues two signals to the motor driver. One is the pulse speed/width to increment. The other signal is direction of travel. |
| Stiffness | Resistance of a device to deformation when moving under a load. |
| Straight Line Accuracy | A measurement of the side to side deviation from the true line of travel to the horizontal plane. |
|
|
| Synchronous Motion | Simultaneous motion on multiple axes in a coordinated fashion. The assembly line video moving in tandem is an example of synchronous motion. |
| Thrust | A measurement of linear force. A force that moves the carriage in the direction of motion or the direction of the lead screw. Velmex frequently uses thrust to describe the maximum force required to lift or lower the payload vertically. |
| Thrust Bearing | A thrust bearing is a rotary bearing that permits rotation between parts and supports an axial load. |
 |
|
| Torque | A measure of how much force acting on an object will cause that object to rotate (move). Measured in foot-lbs. |
| Translation | The process of a lead screw converting rotary motion into linear or straight line motion. Positioning devices are sometimes referred to as "translation slides" or "translation stages". |
| Travel Distance | The full range of motion that a particular slide or stage is capable of. Usually measured as the length of the ways/base less the length of the carriage. |
| Traverse | The full travel distance of the carriage (payload). |
| Unipolar Stepper Motor | Stepper motor that operates with a single – positive – voltage. |
| Velocity | The speed at which a motion system or (motor) operates. It is usually measared in RPMs or RPS. |
| Ways | A path, track or guide on which the carriage rides. Velmex uses dovetail ways where the carriage is interlocked with the ways. Also guide way. |
 |
|
| Whipping | When the lead screw vibrators or oscillates excessively. Typically occurs when traveling at speeds exceeding the specifications of a system. |
| Wobble | Irregular rocking motion usually found on a rotating table or stage. Error between the actual axis of rotation and theoretical axis of rotation. |
 |
|
| Yaw | The motion that rotates around the Z or vertical axis. See Axes of Motion. |
Typical Modes or Functions for Motion Stages
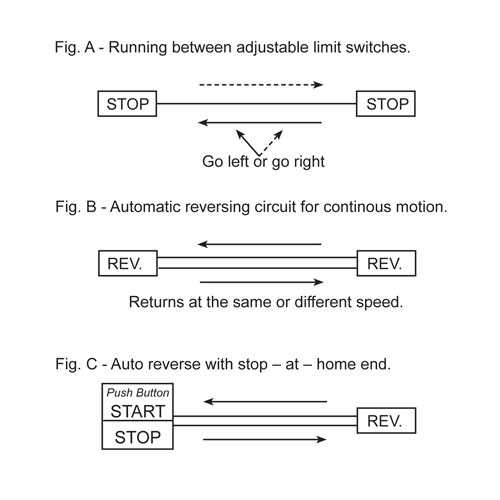
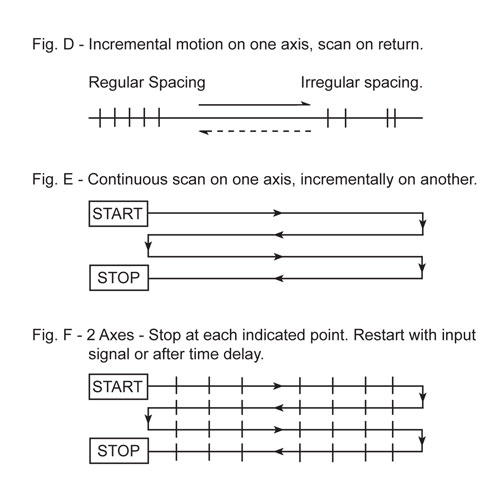
Generally there are two functional uses of motorized positioning devices: Scanning or Positioning.
Scanning |
||
|---|---|---|
In this category, the objective or work to be accomplished occurs while the slider carriage is in motion. Scanning functions can be further subdivided into two types: scanning at a single, fixed speed or at one of a range of user selectable variable speeds. |
 |
|
Unregulated Speed Control – Typically, a high slip AC induction motor speed will fluctuate due to varying loads and voltages. |
||
Positioning |
||
The objective is to move to a target position and either stop or move again. This is commonly achieved by using a stepper motor and an accurate lead screw. The motor is incremented/programmed a predetermined number of steps to achieve the desired position. The position can be relative or absolute. |
 |
|